混动动力总成发动机管理控制器软件架构设计与开发
随着全球汽车产业向电气化、智能化转型,混合动力汽车(HEV/PHEV)凭借其在节能减排与续航里程间的卓越平衡,已成为当前市场的主流选择之一。作为混合动力系统的“大脑”,发动机管理控制器(ECU)的软件架构设计与开发至关重要,它直接决定了整车的动力性、经济性、平顺性及排放水平。本文将系统阐述混动动力总成发动机管理控制器软件架构的核心设计思想、关键模块以及开发流程。
一、 软件架构设计的核心目标与挑战
混动系统集成了内燃机、电机、电池、变速箱等多个复杂子系统,其ECU软件架构设计需实现以下核心目标:
- 功能整合与协同控制:无缝协调发动机启停、扭矩分配(发动机 vs. 电机)、模式切换(纯电、混动、充电等)、再生制动等复杂功能。
- 实时性与确定性:确保在毫秒级的时间内完成传感器数据采集、控制算法运算与执行器驱动,满足严格的车辆驾驶实时性要求。
- 安全性与可靠性:符合ISO 26262功能安全标准(ASIL C/D级常见),具备故障诊断、容错处理及安全状态转换能力。
- 可扩展性与可维护性:平台化设计,便于适应不同混动构型(如P0-P4)、不同发动机型号以及未来功能升级(如OTA)。
- 资源优化:在有限的计算与存储资源内,高效运行复杂的控制策略。
主要挑战在于多物理域耦合、多目标优化(动力vs.经济vs.排放)、动态工作模式繁多以及严格的汽车电子开发标准。
二、 分层模块化软件架构设计
现代混动ECU软件普遍采用基于AUTOSAR(汽车开放系统架构)标准的分层模块化设计,以实现软硬件解耦与功能模块化。典型架构可分为以下四层:
1. 基础软件层(BSW)
- 微控制器抽象层(MCAL):提供对MCU硬件(如ADC、PWM、CAN控制器)的统一访问接口。
- 服务层(Services):提供系统服务(如操作系统、内存管理、诊断协议UDS/OBD)、通信服务(CAN、LIN、以太网协议栈)以及复杂驱动。
- 实时运行环境(RTE):作为应用层与基础软件层之间的“桥梁”,实现AUTOSAR组件间的通信,是软件架构的核心枢纽。
2. 应用层(Application Layer)
这是实现混动控制策略的核心,通常采用模块化组件设计:
- 整车能量管理策略(VMS)模块:顶层决策大脑。根据驾驶员需求(加速踏板、挡位)、电池状态(SOC)、导航/路况信息等,实时计算整车需求扭矩,并决策最优工作模式(如纯电驱动、串联充电、并联驱动等)及发动机启停指令。
- 发动机协同控制模块:
- 扭矩协调与分配:接收VMS指令,动态分配发动机目标扭矩与电机目标扭矩,确保动力平滑衔接。
- 发动机智能启停控制:实现快速、平稳、低振动的发动机启动与停机。
- 燃烧与排放控制:精确控制喷油、点火、节气门、EGR等,在混动特定工况(如低负荷发电、急加速助力)下优化效率与排放。
- 电机控制模块:与电机控制器(MCU)协同,实现驱动、发电、转矩补偿等功能。
- 电池管理交互模块:与电池管理系统(BMS)通信,获取电池状态边界(最大充放电功率等),确保电池安全。
- 变速箱协调模块:与变速箱控制单元(TCU)协同,在模式切换或换挡过程中协调扭矩,保证平顺性。
- 热管理集成模块:协调发动机冷却、电机冷却、电池冷却/加热系统,优化整体热效率。
- 诊断与故障处理模块:实时监控各子系统状态,实施故障诊断、分级处理(如点亮故障灯、限制功率、进入跛行回家模式)并存储故障码。
3. 复杂驱动层与硬件接口
处理特定传感器(如曲轴/凸轮轴位置传感器、爆震传感器)信号和高速执行器(如高压喷油器、点火线圈)的精准定时驱动。
4. 操作系统层
采用符合OSEK/VDX或AUTOSAR OS标准的实时操作系统(RTOS),负责任务调度、中断管理和资源保护,确保关键任务的实时性。
三、 核心软件设计策略
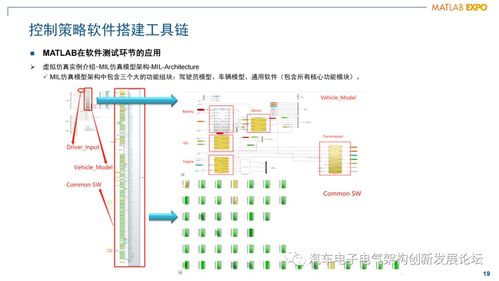
- 基于模型的设计(MBD):控制算法(如VMS、扭矩分配)多在MATLAB/Simulink环境中进行模型搭建、仿真验证和自动代码生成(通过Embedded Coder等),提高开发效率与代码可靠性。
- 状态机设计:广泛应用于模式管理(如驾驶模式、发动机状态)。明确定义各个状态、转换条件及输出动作,确保系统行为清晰、可靠。
- 接口标准化与数据抽象:通过AUTOSAR接口(Sender-Receiver, Client-Server)或自定义标准数据接口,明确定义模块间交互的数据和信号,降低耦合度。
- 时间触发与事件触发结合:关键周期性控制任务(如扭矩计算,10ms周期)由时间触发;非周期性事件(如模式切换请求、故障事件)由事件触发,通过中断或任务间通信机制处理。
四、 软件开发流程
遵循汽车行业通用的V模型开发流程,并与功能安全(ISO 26262)流程深度融合:
- 需求分析与系统设计:定义软件功能需求、性能指标及安全目标。进行系统级和软件级架构设计。
- 软件详细设计与建模:细化模块设计,利用MBD工具进行算法模型开发与仿真验证(MiL,模型在环)。
- 软件实现与集成:生成或手写代码,配置AUTOSAR基础软件,在专用集成环境(如EB tresos, Vector DaVinci)中完成应用软件组件与RTE的集成。
- 验证与确认:
- 软件在环测试(SiL):测试生成代码的功能。
- 处理器在环测试(PiL):在真实MCU或仿真器上测试代码。
- 硬件在环测试(HiL):将ECU软件加载到真实控制器或快速原型控制器中,与高保真的车辆模型和仿真硬件环境进行闭环测试,覆盖全工况与故障注入。
- 台架与实车测试:在发动机台架、动力总成台架及整车上进行最终标定与验证。
- 标定与优化:使用标定工具(如INCA, CANape)对软件中的大量参数(如MAP图、阈值、PID参数)进行精细化调整,以优化实际性能。
- 发布与维护:生成生产软件,并建立持续的故障监控与OTA升级能力。
五、 未来发展趋势
未来软件架构将进一步向域集中式/整车集中式演进,发动机管理可能作为动力域控制器的一个功能集成其中。人工智能/机器学习算法将更深度地应用于能量管理策略优化,SOA(面向服务架构) 理念的引入将支持更灵活的功能部署与OTA更新。网络安全(ISO/SAE 21434)也将成为架构设计的必备要素。
结论
混动动力总成发动机管理控制器的软件架构是一个高度复杂、安全关键的系统工程。成功的设计依赖于清晰的分层架构、模块化的功能组件、遵循AUTOSAR等开放标准、紧密结合MBD开发方法以及严格的V模型开发与验证流程。随着技术演进,该软件架构将持续向更高度的集成化、智能化与网联化方向发展,为混动汽车带来更卓越的综合性能。
如若转载,请注明出处:http://www.tongyst.com/product/81.html
更新时间:2026-06-18 23:27:06